


Vous consultez notre ancien site web, accédez au nouveau site sur www.openstreetmap.fr
OpenStreetMap, la base d'un nouveau plan Michelin
 OpenStreetMap et Michelin : jusqu'à présent, ces deux mondes n'avaient pas de points communs. Février 2013 marque un tournant, avec la parution du premier plan Michelin basé sur OSM : le plan n°70, qui couvre Clermont-Ferrand et son agglomération.
OpenStreetMap et Michelin : jusqu'à présent, ces deux mondes n'avaient pas de points communs. Février 2013 marque un tournant, avec la parution du premier plan Michelin basé sur OSM : le plan n°70, qui couvre Clermont-Ferrand et son agglomération.
Un prototype
La base OpenStreetMap est-elle utilisable ? Question un peu abrupte, mais qui résume les interrogations, nombreuses, qui alimentent la réflexion au sein de l'équipe des cartographes chez Michelin. Que peut-on faire avec cette base ? Quelles contraintes dans son utilisation ? Quels bénéfices en retour ? Quels facteurs d'innovation à la clé ?
Pour tenter de répondre, rien de tel qu'un test en vraie grandeur, une preuve par l'exemple. Le projet qui se met en place début 2012 réunit documentalistes, cartographes, et membres de l'équipe Innovation de Michelin Travel Partner. Le cadrage est le suivant : réaliser une première carte commercialisable en s'appuyant sur le contenu d'OSM, et dérouler toutes les étapes nécessaires pour y aboutir, le tout avec un mode de fonctionnement de type "prototype", incluant la possibilité de ne pas arriver au terme du test.
La cible
Une fois ces principes posés, restait à définir la cible. Le choix s'est porté sur un Plan de ville, ce qui permet de rester à un niveau d'échelle compatible avec la précision des informations habituellement rencontrées dans la base OSM en zone urbaine, du moins en France, notamment en zone où le cadastre vectoriel est disponible. Un plan, donc. Mais de quelle ville ? Même si les territoires bien couverts ne manquent pas, un choix s'est imposé, hautement symbolique pour Michelin : Clermont-Ferrand.
Deux principales raisons à cela. Tout d'abord, ce plan n'était pas au catalogue. On peut y voir un paradoxe... Ensuite, la connaissance de ce territoire, largement partagée au sein de l'équipe, permet un regard critique sur les données et un "supplément documentaire" basé sur les connaissances de chacun.
Dans le détail, le cahier des charges s'appuie sur les points suivants :
- l'emprise est un rectangle englobant la commune de Clermont-Ferrand
- l'échelle du plan est le 1/12000ème
- il est possible d'ajouter des encarts zoomés (à définir), si certaines emprises sont trop complexes à représenter lisiblement à cette échelle
- présence impérative de tous les noms de rues, des sens uniques et restrictions, des équipements publics (gares, écoles, postes, lieux de culte), du réseau de tramway, enfin présence sélective de bâtiments selon leur intérêt pour le repérage.
À cette liste viennent s'ajouter deux points implicites : les informations doivent combiner exhaustivité et actualité, le tout dans le respect de la licence associée aux données.
Au moment de l'élaboration de ce cahier des charges (début 2012), la base OSM était encore sous licence CC-BY-SA. La volonté de basculer en ODbL était largement confirmée par les faits (annonce initiale de bascule pour début avril 2012, discussions sur le processus technique de bascule, émergence d'outils de visualisation des données incompatibles, y compris dans les éditeurs). Néanmoins, rien ne permettait de savoir quand aurait lieu cette bascule. Impossible par suite de répondre d'avance à la question : sous quelle licence seront les données OSM utilisées dans le prototype ?
Dans le doute, nous n'avions pas d'autre choix que de considérer l'état actuel de la licence, à savoir CC-BY-SA. Un principe simple en découle : OSM sera la seule source utilisée pour ce plan, la viralité de la licence empêchant tout scenario de combinaison avec des données non libres.
La base, concrètement
Une fois ces principes posés, le concret commence avec, logiquement, le besoin d'évaluer le contenu de la base OSM dans et autour de Clermont.
Pour reprendre le cahier des charges, en partant du plus simple, les questions émergent : toutes les rues sont-elles tracées ? Tous les noms sont-ils présents ? Le cadastre (vectoriel) et l'imagerie Bing permettent un premier niveau de réponse sur l'exhaustivité des rues. Le calque "no name" de OSMI révèle quelques grappes de rues sans nom, comme par exemple l'essentiel du quartier de Montferrand. Enfin, un sondage ciblé révèle l'ancienneté de certains objets, telle une station Shell présente dans OSM depuis début 2007, mais contredite par StreetView qui, sur des clichés de 2008, indique une station Total.
Sans pousser plus avant le sondage, un constat s'impose, mitigé : le contenu OSM sur Clermont-Ferrand est conséquent (notamment plus de 500 km de voies intra-muros) mais dans le même temps, il ne permet pas tel que de répondre au cahier des charges, sur l'exhaustivité, et par suite sur l'actualité des données ne serait-ce que de voirie. Il faut donc enrichir la base avant de l'utiliser.
Comment actualiser ?
Le cadastre est une source permettant, à distance, de procéder au complément nécessaire sur la voirie et son nommage. Les bureaux de Poste et les écoles disposent, grâce à http://data.gouv.fr, d'une source à licence compatible. L'imagerie Bing offre sur l'agglomération une vue à la définition correcte : on distingue de nombreuses flèches de sens unique par exemple. Néanmoins, faute d'une maintenance au quotidien par suffisamment de contributeurs sur place, il n'est pas possible de se contenter de ces sources. Renseignement pris par nos documentalistes auprès de la mairie de Clermont-Ferrand, il n'y a pas sur le court terme (sur le temps du projet) de perspective d'ouverture de données de voirie, municipales ou intercommunales, permettant de fournir une information autorisée, de référence et à jour. Cette information est bien visible sur le site de la ville, mais son intégration dans OSM n'est pas d'actualité. Le seul scenario qui se dégage de ce constat est simple : il faut se rendre sur place et collecter nous-mêmes les informations de voirie.
La préparation du relevé terrain
La cible du relevé est dès le départ claire : la collecte doit permettre la mise à jour exhaustive des informations de voirie devant figurer sur le plan. Les questions portent plutôt sur les techniques à mettre en oeuvre. En effet, comment tout parcourir ? Quelle nature de document rapporter ? Quelles méthodes sont les plus efficaces pour à la fois minimiser le temps passé et maximiser l'information relevée ?
Quelques décisions initiales guident la réflexion : l'équipe sur place sera constituée d'une seule personne, mais les informations collectées seront dispatchées vers plusieurs cartographes pour leur restitution dans la base OSM. Il faut donc un format de document facilement partageable, le plus autonome possible. La prise de photos géotagguées se dégage vite comme la piste ayant la meilleure efficacité, en comparaison de documents papier (type Walking Papers) ou de notes audio. La vidéo, bien que prometteuse avec un plugin en développement pendant le GSoC 2012, n'est pas retenue car la méthode manque encore de maturité, du moins au moment où nous devons nous décider.
Reste à déterminer par quel moyen ces photos seront prises. La solution doit permettre de parcourir toutes les rues dans la mesure où la volonté de mise à jour concerne tout le filaire, y compris piéton. Se déplacer partout, le plus rapidement, le plus efficacement possible. La réflexion combine le choix du mode de transport et celui de l'appareil de prise de vue, le tout pour un pilote seul.
La voiture est vite retoquée : manque de souplesse et potentielle impossibilité d'atteindre des voies étroites, ou soumises à restriction (le réseau piéton du centre-ville par exemple). Et sans copilote, impossible de gérer les prises de vue en sécurité. Le deux-roues motorisé est plus maniable, mais encore trop lourd en prévision de certaines situations (escaliers). Le vélo électrique rate l'élection de peu : avantageux là où le relief est prononcé (Chanturgue, Beaumont, Chamalières), il impose une gestion particulière pour ses batteries (autonomie, recharge) et reste lourd en cas de portage. Le mode piéton est aussi retoqué, la distance à parcourir étant trop importante (autour de 500 km) dans le temps imparti (une semaine). Le gagnant est le vélo. Le plus maniable et léger des candidats non piétons, toléré en zone piétonne, portable dans les escaliers, avec un rayon de demi-tour incomparable et jamais en panne de carburant : le problème est reporté sur le cycliste !
Pour les prises de vue, l'idéal est un équipement qui ne distrait pas le cycliste pendant son trajet, sécurité oblige. Un appareil qui permette des prises de vue sans occuper les mains, bien plus utiles sur le guidon. Un appareil enfin qui permette des prises de vue panoramiques, sans mise au point, et rafale, histoire de ne pas avoir à déclencher les prises, ni même avoir à y réfléchir. Le choix se porte vite sur les combinés camescope/appareil photo adaptés aux sports mécaniques. Des accessoires permettent de fixer l'appareil sur le casque. Les prises de vue en rafale sont réalisable à raison d'une photo toutes les 500ms, avec une forte définition (11 Mo pixels), permettant de lire par exemple une plaque de rue depuis la chaussée, sans ralentir.
L'équipement ne serait pas complet sans un logger GPS afin de corréler position et prises de vues, pour rendre l'exploitation possible avec JOSM. Par précaution, ce sont 3 loggers qui sont utilisés, afin d'anticiper les pannes (au pire) et moyenner les traces (au mieux).
Le relevé terrain
Il se déroule mi-juin 2012, sur une semaine.
En guise de bilan :
- 180000 prises de vue, soit 400 Go de fichiers jpg
- environ 500 km de traces
- un peu de pluie pour commencer, de plus en plus de soleil au fil de la semaine, 31° le dernier jour et des coups de soleil en bonus
- beaucoup de curiosité de la part de piétons rencontrés, du fait de l'accoutrement : la caméra sur le casque n'est pas un accessoire des plus discrets. Pas d'hostilité cependant, hormis celle d'un chien sur les hauts de Chanturgue : quelques frayeurs pour les mollets mais c'est tout
- enfin, et surtout : la découverte au fil des trajets de nombreuses circulations, notamment piétonnes, absentes d'OSM et qui mériteraient d'y figurer : une validation (s'il était besoin) du choix de procéder à un relevé terrain.
| Au fil de la collecte : rencontres et trouvailles sur les Hauts de Chanturgue | ||
| Sur le Chemin Vert : une ascension pas sans risque, mais récompensée par la découverte d'un escalier | Rue Fontaine du Large : jusque là tagguée en rue résidentielle | |
 |  |  |
La mise en forme des données collectées
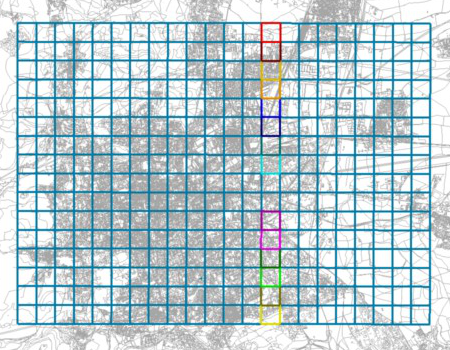
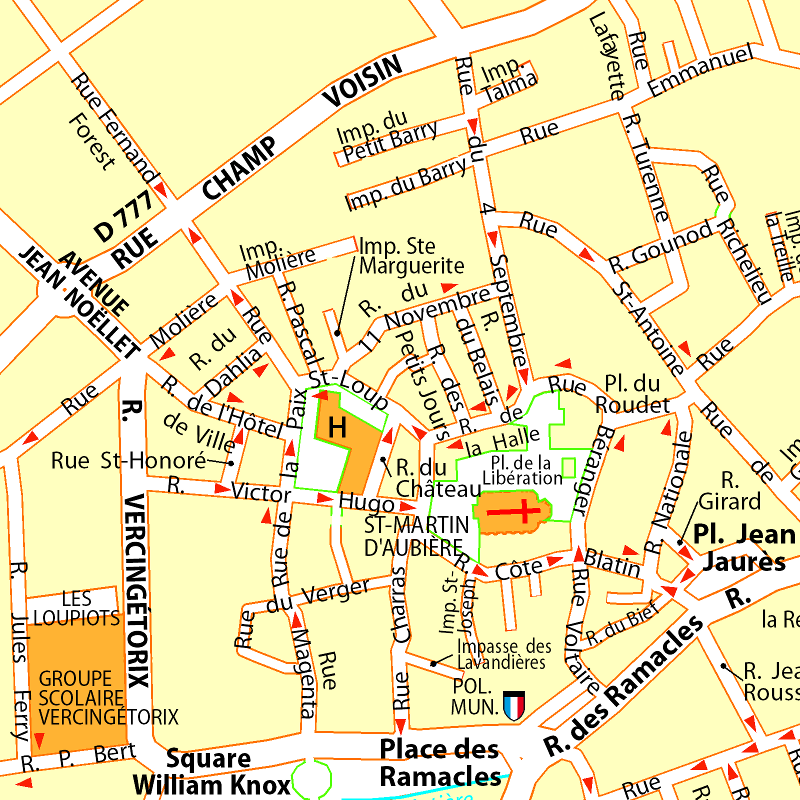
Au retour, les traces GPS et les clichés sont combinés, au moyen d'ExifTool. Les photos ainsi positionnées sont croisées à un carroyage, qui couvre arbitrairement le territoire du futur plan par pavés de 500m de côté. Chaque carreau devient pour les cartographes une unité de travail, où les clichés sont passés en revue et les infos relevées transcrites en objets dans la base OSM.
| Traces GPS (en rose) et photos géotaguées sur Montferrand. En rouge les limites du carroyage de travail | |
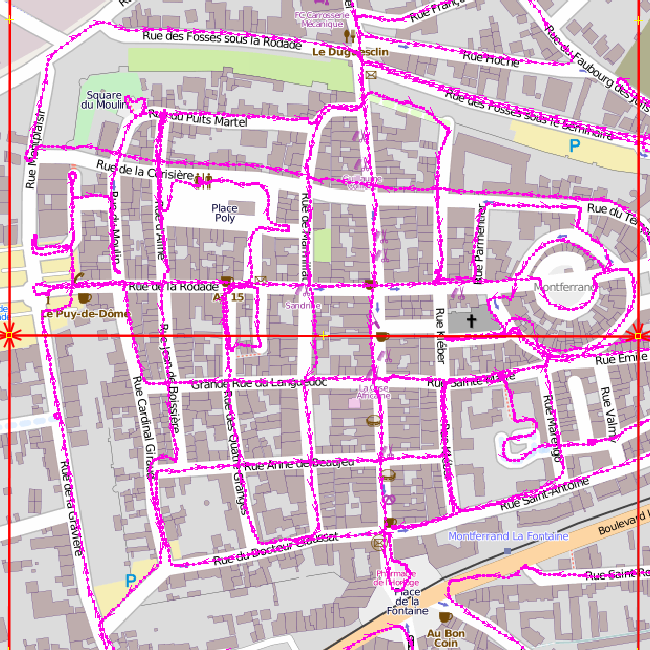 | 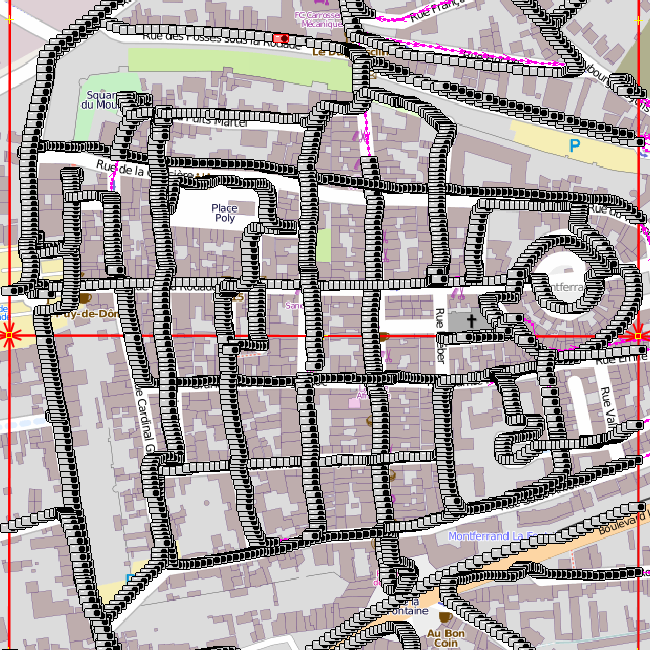 |
Par commodité, le carroyage a été défini dans un fichier au format OSM, afin de pouvoir le superposer aux traces et photos. Et ce qui devait arriver est arrivé : il a été par erreur envoyé en base, au même titre que les données. Boulette révélée par la vue OSM Mapper d'ITO, et aussitôt réparée.
| Le carroyage de travail, révélé sur une vue d'ITO |
 |
La restitution
Cette phase est par nature longue et fastidieuse compte tenu du volume d'information produit par les clichés. Le cadastre et l'imagerie Bing sont utilisés en combinaison, le tout au travers de JOSM. Si la densité de clichés permet une bonne immersion, l'exercice reste difficile pour les cartographes qui en ont la charge, car ça n'est pas leur propre expérience du terrain. Ils doivent interpréter un terrain qu'ils n'ont pas parcouru, ce qui demande des efforts supplémentaires.
Les informations ajoutées en base
Un bilan (partiel) peut être produit pour la ville de Clermont-Ferrand, la seule pour laquelle des statistiques avaient été calculées avant la restitution.
- 400 nouveaux noms de voies
- 120 km de voirie ajoutés (tous types de highways confondus)
- + 50% de highways=residential (en nombre comme en longueur cumulée)
- triplement du nombre, et de la longueur des escaliers : 1.5 km au final
À noter également l'utilisation du tag landuse=school pour les groupes scolaires, l'intégration des écoles ayant été devancée par cette discussion.
L'exploitation
La restitution en base est une étape qui a un grand point commun avec l'élaboration d'une carte : il est difficile de s'arrêter.
Dans notre cas, la somme des informations visibles sur les clichés est bien plus importante que ce qui est attendu sur le plan, il est donc tentant de rajouter une cabine téléphonique par ici, un feu rouge par là, affiner une géométrie... Arrive néanmoins le moment où il faut décider que la base est au niveau attendu, et donc qu'on peut arrêter son enrichissement, pour passer à son exploitation. Heureux hasard du calendrier, ce moment converge avec l'arrivée officielle des premiers extraits ODbL de la base, annoncés ici. Ce point permet de créditer sur le futur plan les contributeurs d'OpenStreetMap avec la référence à la licence ODbL, et de ne plus se trouver en phase de transition.
De la base au dessin du plan
La base nécessaire au plan est extraite d'un fichier "Auvergne" proposé par Geofabrik. S'ensuivent des étapes qui vont permettre de passer d'un monde à l'autre, des nodes, ways, relations et tags d'OSM aux couches métier, en structuration SIG, attendues pour le dessin du plan. Ces étapes permettent tout d'abord de produire un extrait de données réduit au périmètre du plan, en format OSM. Ces données sont ensuite converties, selon des combinaisons de valeurs de tag et de relations spatiales, d'objets OSM en entités cartographiables : différentes classes de routes, rues, circulations piétonnes, des emprises et des bâtiments ventilés selon leur fonction, des espaces boisés, de l'hydrographie, etc. Vient alors l'étape clé, de mise en forme des objets, qui deviennent des éléments de dessin. On quitte la topographie des données vectorielles, pour entrer dans la cartographie.
L'application d'une charte s'accompagne d'une étape propre au niveau de détail de la source OSM. En effet, à l'échelle où nous devons dessiner le plan (1/12000ème), certains objets se chevauchent. Or le plan doit être en tout endroit lisible et non ambigü. Il faut en conséquence retravailler la géométrie de certains objets, en les écartant, afin de leur trouver une place, décalée par rapport au terrain, mais pertinente sur le plan. Des modifications à ne surtout pas reporter dans la base OSM !
| La place de l'Esplanade : une géométrie OSM (g) déformée pour le dessin (d) | |
 | 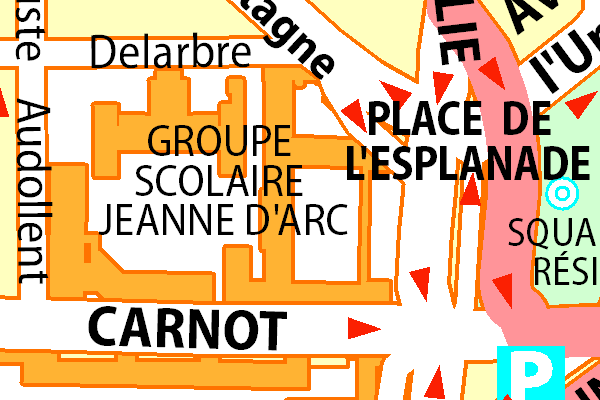 |
Au fil de la fabrication, on tombe parfois sur un oubli, issu d'un manque dans les données. C'est le cas par exemple avec les remparts de Montferrand, absents de la base au jour de notre extraction. Deux lignes s'affrontent alors. D'un côté : on ne représente pas les remparts, c'est trop tard, l'extraction est faite, tant pis. De l'autre : quoi ? Pas de remparts à Montferrand ? Alors qu'on les voit sur le terrain ? Impensable !
Heureusement, quand tout le monde soutient la deuxième ligne, la bataille est courte. Décision est donc prise de rejouer, ponctuellement, le processus complet : saisie dans OSM, export, mise en forme dans le SIG.
| Un des remparts de Montferrand, ajouté en base (en bleu, à gauche) puis dessiné sur le plan | |
 | 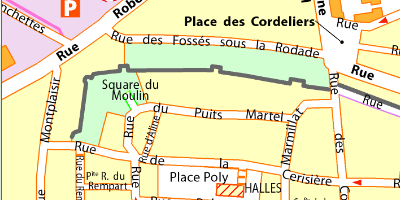 |
À ce stade, le plan n'est encore qu'un dessin muet. Il faut maintenant s'attaquer au placement des textes, tous les textes... Des outils à la disposition des cartographes permettent de définir automatiquement un premier positionnement, obéissant à des règles de placement, à l'image de ce que Mapnik permet pour l'édition Web. Mais là s'arrête la partie commune entre web et papier. Pour ce dernier, une phase de positionnement manuel s'engage, afin de placer l'intégralité des textes. Là où la place manque, il faut selon le cas abréger, tourner, déplacer et lier avec un trait (la "fusée"). En complément, décision est prise de réaliser plusieurs encarts, où l'échelle sera le 1/6000ème. Sur les centre-villes de Clermont, Aubière et Royat, ou encore sur le quartier de Montferrand, la densité des textes à placer rend ce choix impératif.
| Le centre d'Aubière : un des encarts au 1/6000ème |
 |
L'étape qui clôt le processus est celle de constitution de l'index. Un carroyage est fabriqué, qui couvre l'emprise du plan à la manière d'un plan de bataille navale. Chaque texte dans sa position définitive est confronté au carroyage, afin de déterminer quelle case l'accueille. Ce croisement est convertit en listes alphabétiques, où chaque texte (nom de rue, édifice) est associé à la référence de son carreau, le tout dispatché par commune.
Ça y est, le plan est terminé. Il reste à passer du dessin au produit fini ; en ajoutant un plan de bus (non basé sur OSM, mais directement fourni par la T2C, avec son copyright, et représenté hors du plan), couverture, code-barres, ISBN, tous les éléments d'habillage viennent prendre leur place; en procédant aux dernières validations d'usage et enfin : direction l'imprimerie !
Le résultat
Initialement abordé comme un prototype, le plan de Clermont-Ferrand a su franchir toutes les étapes de la réalisation, en respectant aussi bien les contraintes liées à la source des données (la licence, les conventions de saisie) que le cahier des charges imposé habituellement par Michelin pour les plans de villes basés sur sa propre documentation.
Disponible depuis quelques semaines dans le commerce, ce produit a, en tant que tel, une facture traditionnelle, du point de vue des cartographes Michelin. La "patte" maison est reconnaissable, le savoir-faire constitué depuis maintenant plus d'un siècle sur les cartes a trouvé une nouvelle déclinaison dans cette réalisation.
Sous ce classicisme apparent, il s'agit néanmoins d'une réelle innovation. Le recours à OpenStreetMap comme source est, pour Michelin, une petite révolution, tant au niveau des processus de collecte documentaire que par le simple fait de s'appuyer sur une base de données collaborative sous licence libre.
À contre-courant de la majorité des utilisations d'OpenStreetMap, ce plan rappelle que les innovations ne sont pas cantonnées au domaine numérique : en puisant aux bonnes sources, le plan papier n'a pas dit son dernier mot.
Test concluant donc, qui permet de préfigurer un possible fonctionnement à l'avenir, même s'il est encore trop tôt pour savoir quand et sous quelle forme une nouvelle réalisation de Michelin basée sur OSM verra le jour.